
- Creation date: 2013
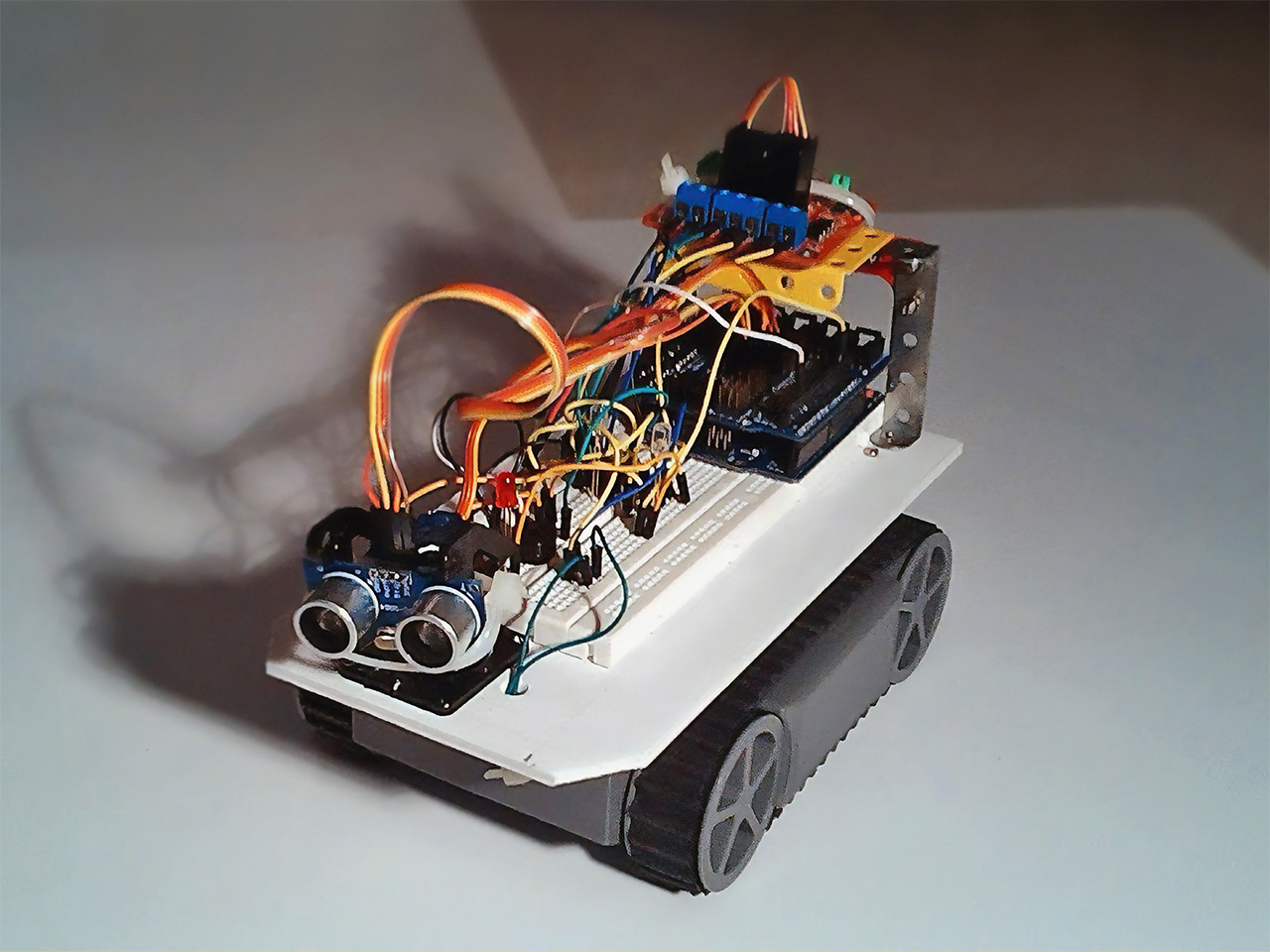
- Technologies: Arduino UNO + chasis + motors & motor controller + servos + proximity sensor + other components
This simple robot, which I created from scratch, was able to move around safely on its own, avoiding obstacles thanks to a proximity sensor attached to a servo that would rotate to allow the robot to "look" around. Not only that, but it would also accept commands from the remote of my TV. Basically, I could either let it explore safely on its own or decide to control it manually with the TV remote.
When in autonomous mode, the robot would rotate the servo to allow the proximity sensor to measure the distance to the closest object at each possible direction. Then, the robot would choose the direction at which the closest observed object was the furthest from the robot in order to move in that direction (the robot would assume that was the safest path). Finally, when a new obstacle was found in the way, the robot would stop and look for the best new direction by repeating the initial process once again. Additionally, if the robot ever detected that an obstacle was dangerously close, it would move back to avoid the danger – and if the obstacle kept on being too close for a while, eventually the robot would spin 180 degrees and try to flee. There were a few more rules the robot would follow to move around safely on its own, but hopefully you get the idea (if not, maybe the videos below will help!).